
自動掃除機を始め、自律走行を必要とする製品が自分の充電器に辿り着けずバッテリが切れたり ![]() 、
同じ道を徘徊する現象が発生します。
誰もが簡単に賢い制御アルゴリズムの研究&開発に挑戦できて、自律走行アルゴリズムの底上げを図っています。
、
同じ道を徘徊する現象が発生します。
誰もが簡単に賢い制御アルゴリズムの研究&開発に挑戦できて、自律走行アルゴリズムの底上げを図っています。
自動掃除機を始め、自律走行を必要とする製品が自分の充電器に辿り着けずバッテリが切れたり ![]() 、
同じ道を徘徊する現象が発生します。
誰もが簡単に賢い制御アルゴリズムの研究&開発に挑戦できて、自律走行アルゴリズムの底上げを図っています。
、
同じ道を徘徊する現象が発生します。
誰もが簡単に賢い制御アルゴリズムの研究&開発に挑戦できて、自律走行アルゴリズムの底上げを図っています。
動作制御アルゴリズムを開発して、PC上で動作結果を確認できます。 PCのSimulation環境にから擬似的に壁、障害物と衝突情報、充電器の方向情報、 電池消費情報、音声認識情報を取り込めます.
 標準サンプルアルゴリズム無料提供(Open Source)
開発Platformを無料提供(Open Source)
標準サンプルアルゴリズム無料提供(Open Source)
開発Platformを無料提供(Open Source)![]() PC Simulation環境「Orion」を無料提供
PC Simulation環境「Orion」を無料提供
 Censor Simulator Area:
衝突センサー、方位センサー、音認センサー、電池監視センサーの作動状態をシミュレーションします。
Action Simulator Area:
モーターの作動状態(前進距離、速度など)、方向転換状態(角度など)をシミュレーションします。
Performance Area:
計画時間、走査カバレッジの情報を評価します。
Test Area:
家具を配置できます。壁の仕切り、障害物を自由設計します。
Censor Simulator Area:
衝突センサー、方位センサー、音認センサー、電池監視センサーの作動状態をシミュレーションします。
Action Simulator Area:
モーターの作動状態(前進距離、速度など)、方向転換状態(角度など)をシミュレーションします。
Performance Area:
計画時間、走査カバレッジの情報を評価します。
Test Area:
家具を配置できます。壁の仕切り、障害物を自由設計します。
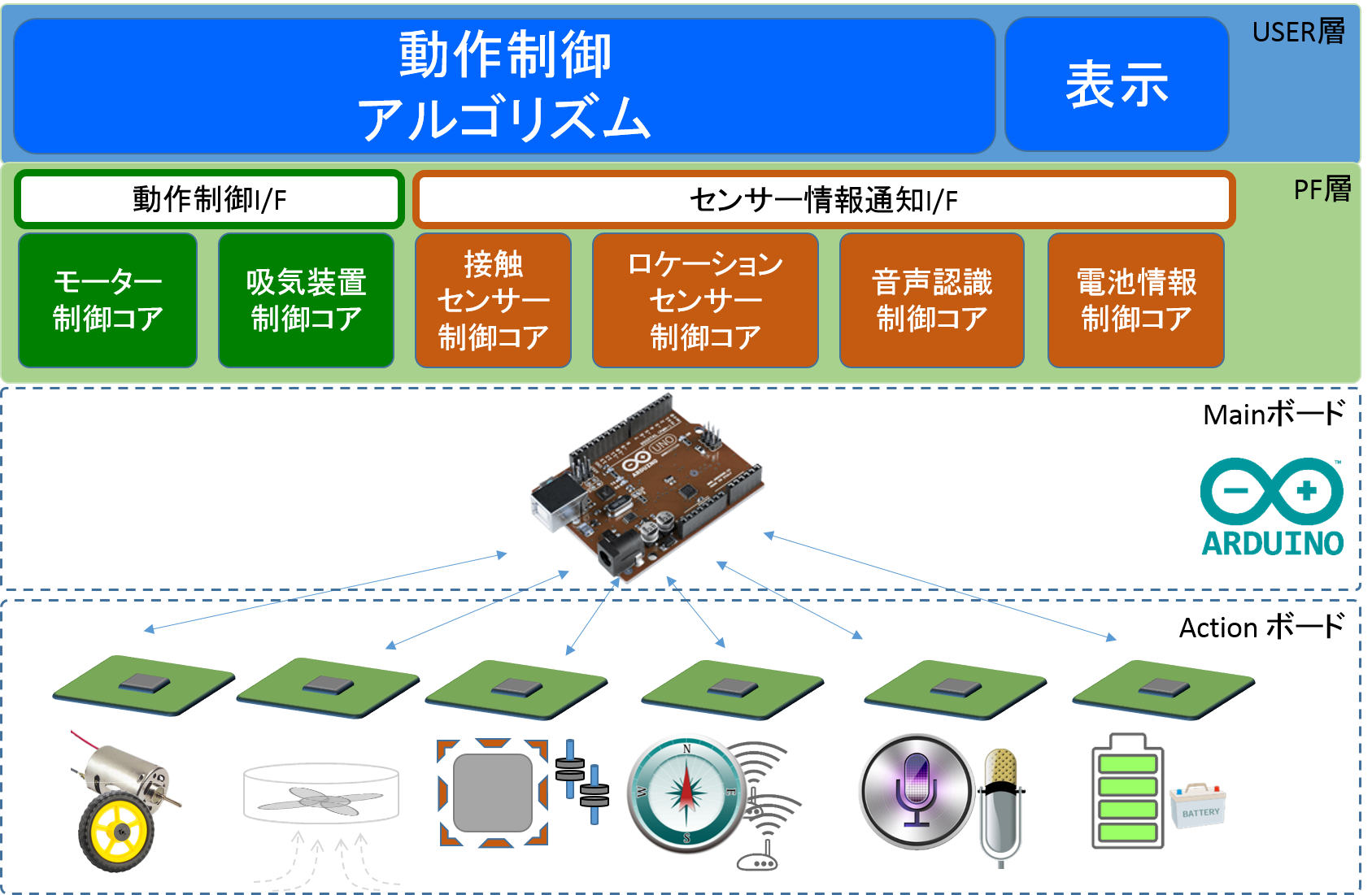 Arduino互換Shieldボード「Orion M42」に乗せることで、お部屋など実際環境で動作確認が可能になります。
Actionボードの詳細は「 Orion M42 」をご参照ください。
Arduino互換Shieldボード「Orion M42」に乗せることで、お部屋など実際環境で動作確認が可能になります。
Actionボードの詳細は「 Orion M42 」をご参照ください。
兵庫県神戸市中央区磯辺通三丁目1番2 NLC三宮 3F
TEL:078-224-5284
FAX:078-224-5286
受付:9:00~18:00
定休日:土日祝